摄影机作为一种高端的数码产品已经深深地融入了我们的生活当中。随着科技的不断发展,摄影机的成像技术也越来越成熟。很多时候,我们只能很表面地看到这台或那台摄影机成像清不清晰、像素高不高,其实这些参数在很大程度上决定于摄影的成像技术。而成像技术中有一项很专业的问题,就是摄影机的标定,即通过摄影机在传感器上的成像来计算真实世界中各个物体的距离与参数。
利用摄像机所拍摄到的图像来还原空间中的物体。在这里,不妨假设摄像机所拍摄到的图像与三维空间中的物体之间存在以下一种简单的线性关系:[像]=M[物]。这里,矩阵M可以看成是摄像机成像的几何模型。M中的参数就是摄像机参数。通常,这些参数是要通过实验与计算来得到的。这个求解参数的过程就称为摄像机标定。
摄像机的标定问题是机器视觉领域的入门问题,可以分为传统的摄像机定标方法和摄像机自定标方法。定标的方法有很多种,常见的有:Tsai(传统)和张正友(介于传统和自定标)等。
摄像机模型采用经典的小孔模型,像面π表示的是视野平面,其到光心的距离为f(镜头焦距)。
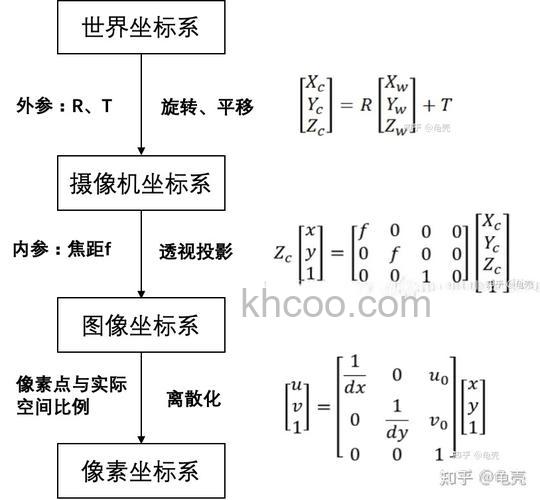
四个坐标系分别为:世界坐标系(Ow),摄像机坐标系(Oc),图像物理坐标系(O1,单位mm),图像像素坐标系(O,位于视野平面的左上角,单位pix)。
空间某点P到其像点p的坐标转换过程主要是通过这四套坐标系的三次转换实现的:首先将世界坐标系进行平移和转换得到摄像机坐标系,然后根据三角几何变换得到图像物理坐标系,最后根据像素和公制单位的比率得到图像像素坐标系(实际的应用过程是这个的逆过程,即由像素长度获知实际的长度)。
ps:通过摄像头的标定,可以得到视野平面上的mm/pix分辨率,对于视野平面以外的物体还是需要通过坐标转换得到视野平面上的数据。
其中计算摄影机标定技术的最基本的一个方法就是通过小孔成像的原理。何为小孔成像?就是光通过一个很小的孔后,能够在另外一块板上投射出一个完整的物象,这就叫做小孔成像。在这种成像技术中,有一个很重要的参数——角度,所有物体的投射都要受到这个角度的影响。所以,通过计算这个角度,就能够计算出真实世界中各个物体之间的真实距离,如果有未知的参数,就用方程组来求得。